





از طریق بخش زیر می توانید تمامی فایل هایی که در جهت مونتاژ و پیاده سازی این مدار (پی سی بی ، بردبورد ، شماتیک) مورد نیاز است تهیه نمایید
برد بوررد
پی سی بی

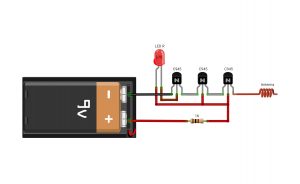
شماتیک
فایل پی سی بی
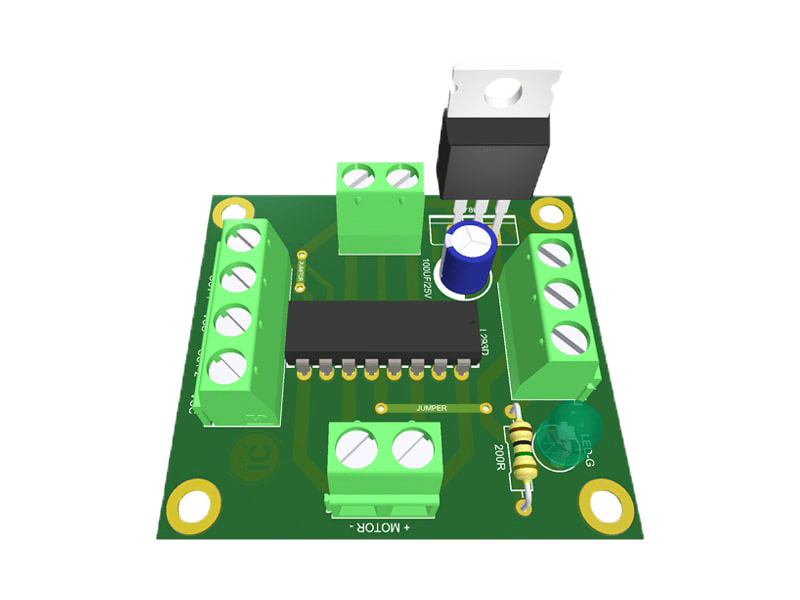
طراحی اختصاصی توسط تیم آیسی مدار
شامل فایلهای PCB, 3D, HELP, SOLDIER
حاوی فایل پروژه با Altium Designer
رعایت اصول طراحی و فوتپرینتهای استاندارد
قابل پیادهسازی به روشهای مختلف
کیفیت بالا در فرمت PDF
44,000 تومان
فایل بردبورد
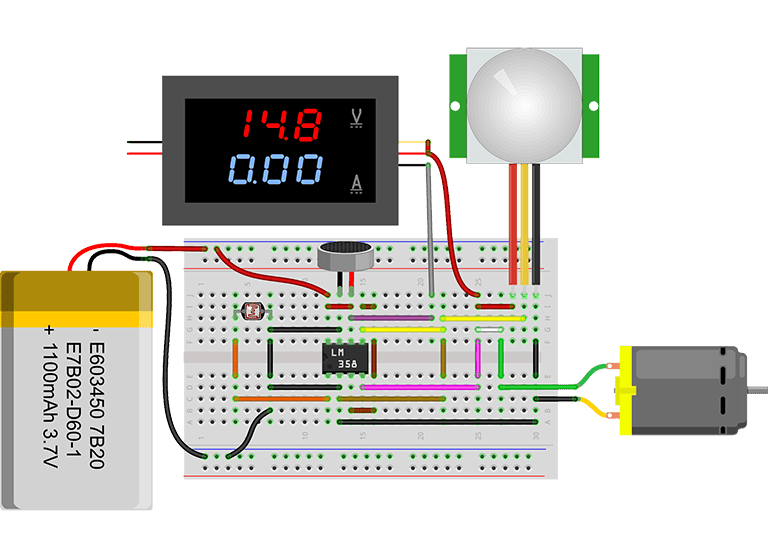
کپیبرداری آسان برای بردبورد
سیمکشی اصولی و واضح
درج مقادیر روی قطعات
پیادهسازی ساده و کم سیم
شبیهسازی واقعی بردبورد و قطعات
کیفیت بالا در فرمت JPG
28,000 تومان
فایل شماتیک

شماتیک مطابق استانداردهای جهانی
طراحی خوانا و اصولی
درج مقادیر قطعات روی شماتیک
طراحی با Altium Designer
خروجی با فرمت PDF
کیفیت بالا در فرمت PDF
34,000 تومان
تهیه برد مونتاژ شده
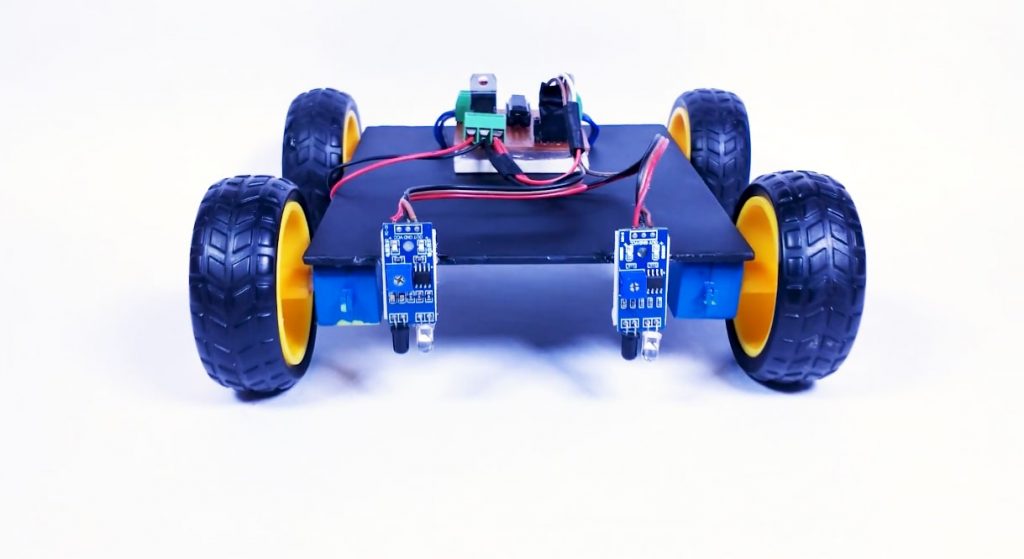
این مدار توسط تیم «آیسی مدار» با فناوری پیشرفته SMD و با کیفیت بسیار بالا طراحی و تولید شده است شما میتوانید از این بخش این برد به صورت مونتاژ شده و آماده استفاده سفارش دهید
موجود نیست!
12 نفر این مدار را ساختند
امیر یوسف رستمیان
 ابراهیم حقی
ابراهیم حقی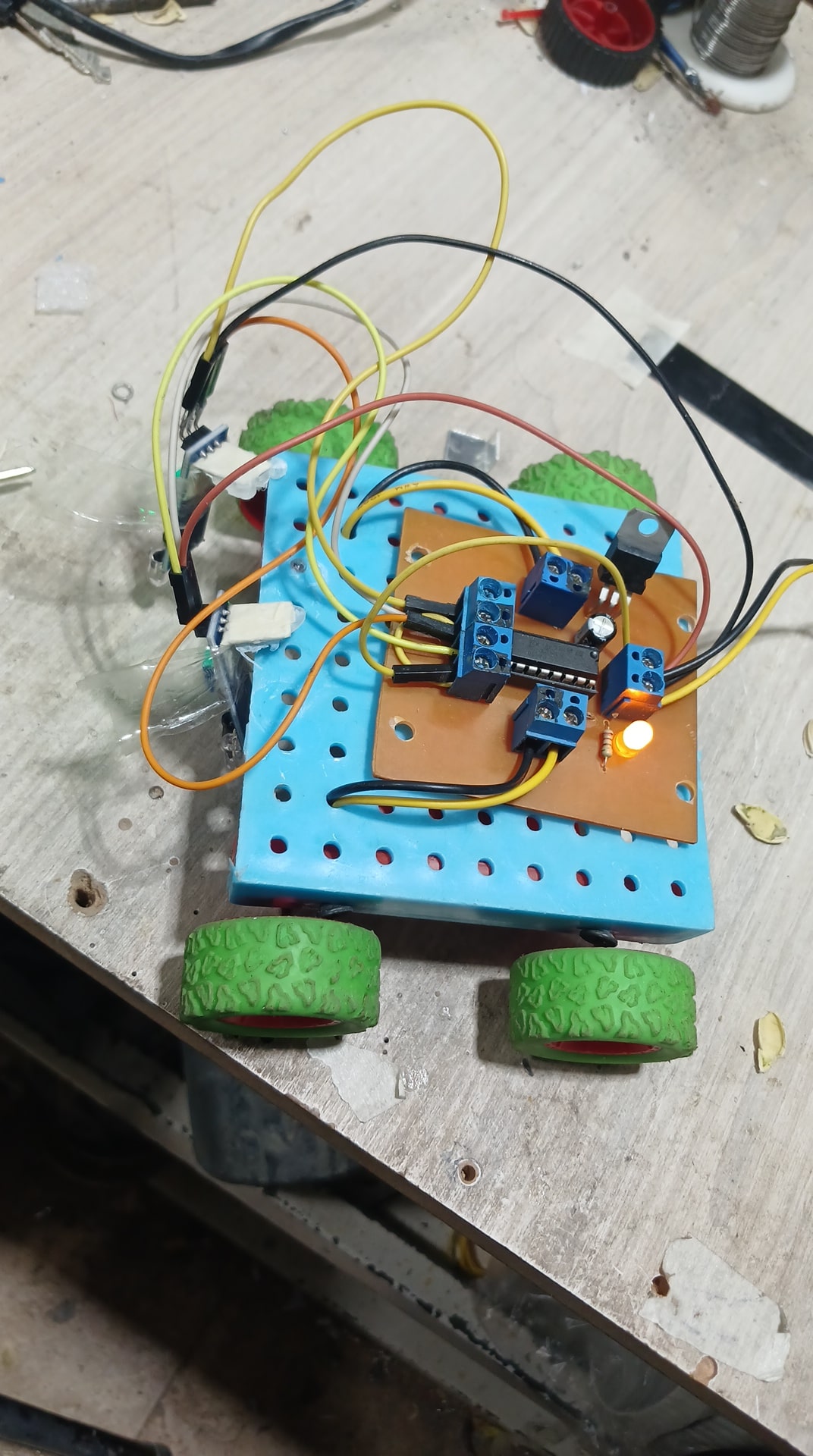 Mohammad hidariii
Mohammad hidariiiابوالفضل دلپسند
 Rohan Rasoli
Rohan Rasoli soroush abolghasemi
soroush abolghasemiامیر درویشی
 amsh amsh
amsh amshعلی عباسی
+ نمایش بیشتر
شما هم این پروژه را ساختید؟
آن را به اشتراک بگذارید←محصولات
مرتبط
بستن
کالاها
دسته بندی ها
- ورود با پیامک
- ورود با رمز
سلام من یک راهنمایی درمورد رباتم داشتم میشه شمارتون روادید که من بتونم تو ایتا بهتون پیام بدم آخه سوالم رو باید با عکس توضیح بدم
پیام سیستم : از درج کامنت تکراری اکیدا خودداری کنید ..
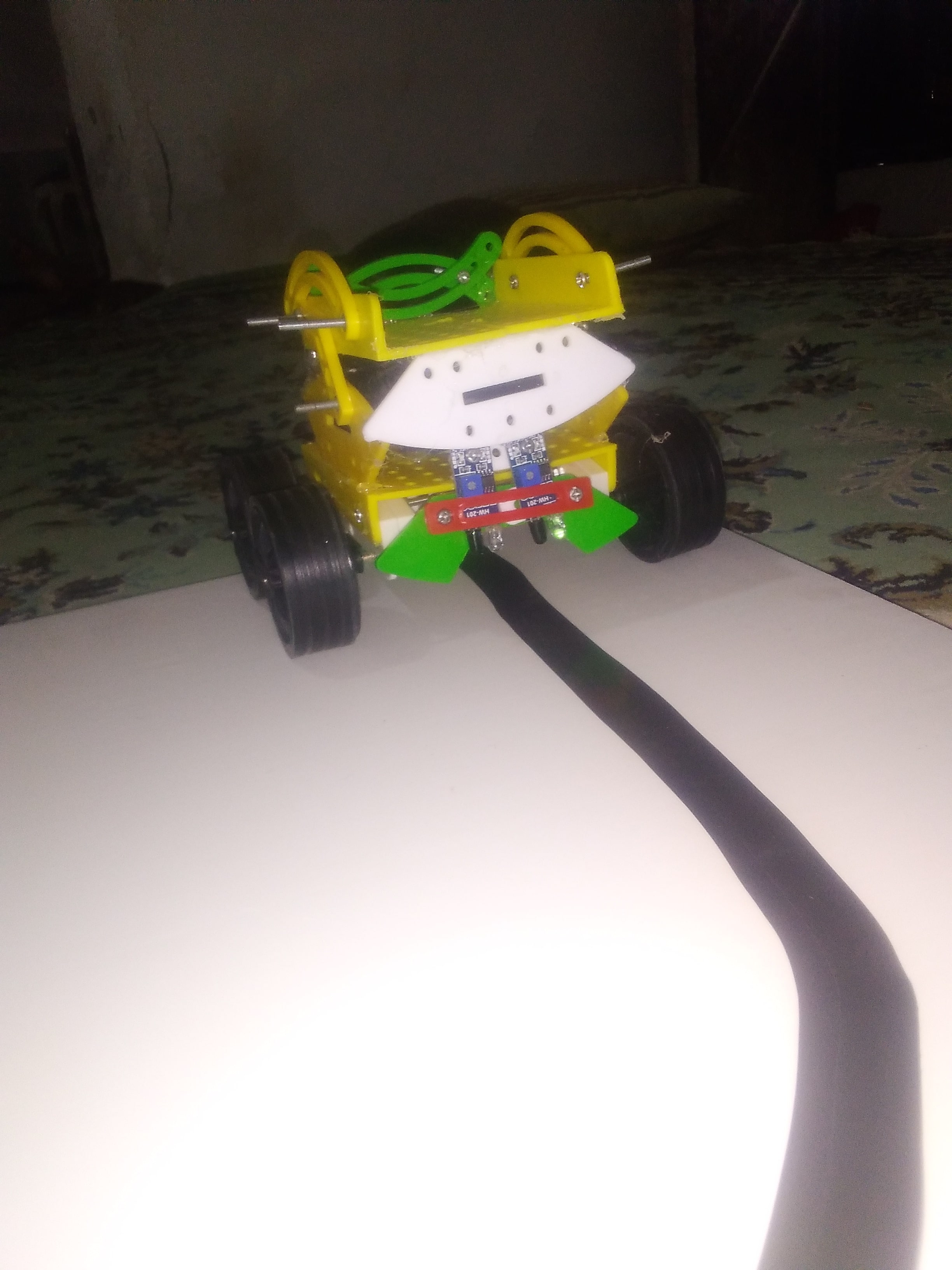
سلام ببخشید من یک سوال درمورد ماشین مسیر یاب بدونه کد نویسی دارم میشه شمارتون رو بدید که در ایتا بپرسم آخه باید براتون عکس بفرستم
سلام آخرین نسخه از اپلیکیشن آیسی مدار رو نصب کنید و در صفحه ایی که مربوط به این مدار هست عکستون رو آپلود کنید بررسی و به سوالاتون پاسخ داده میشه
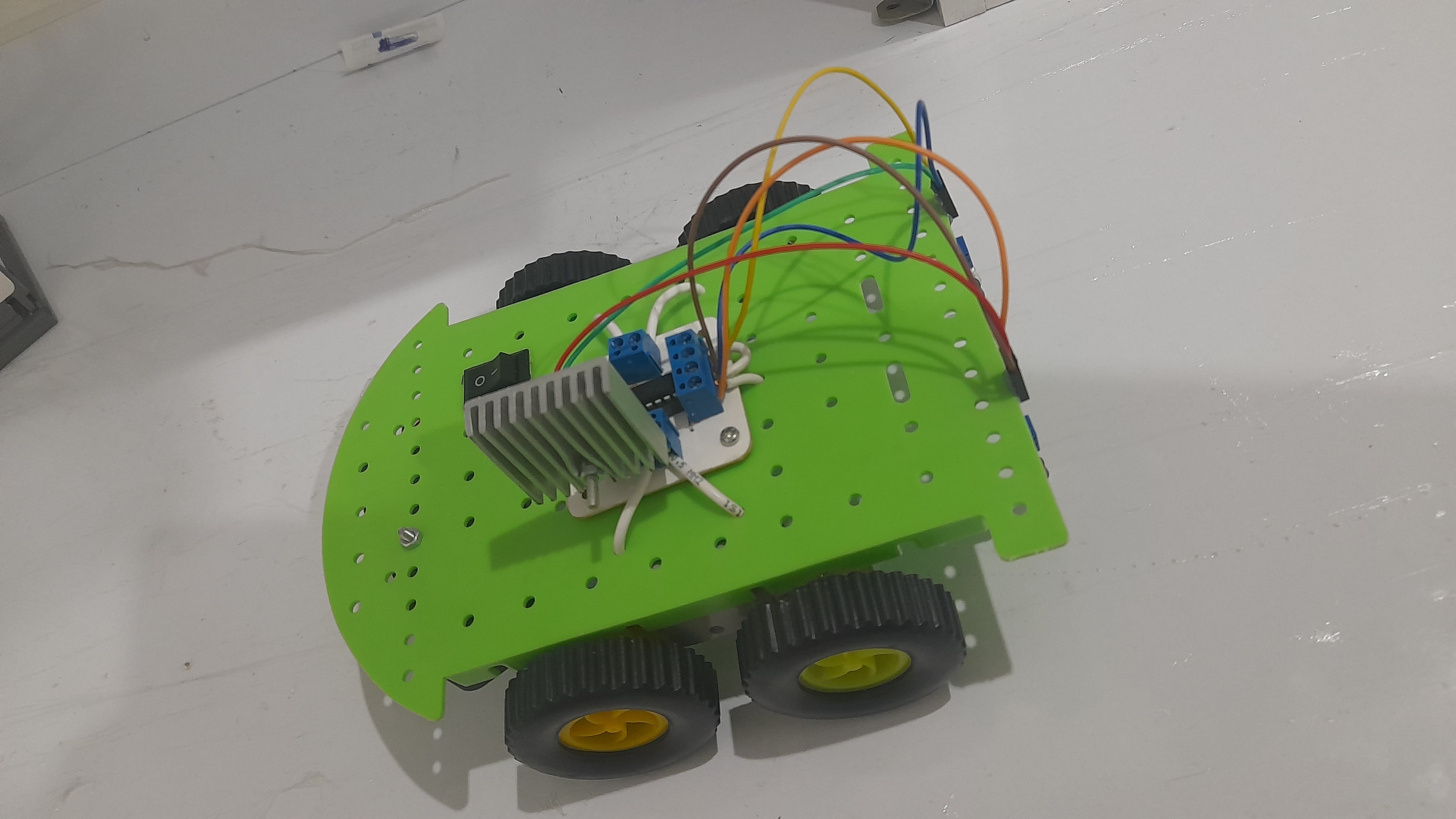
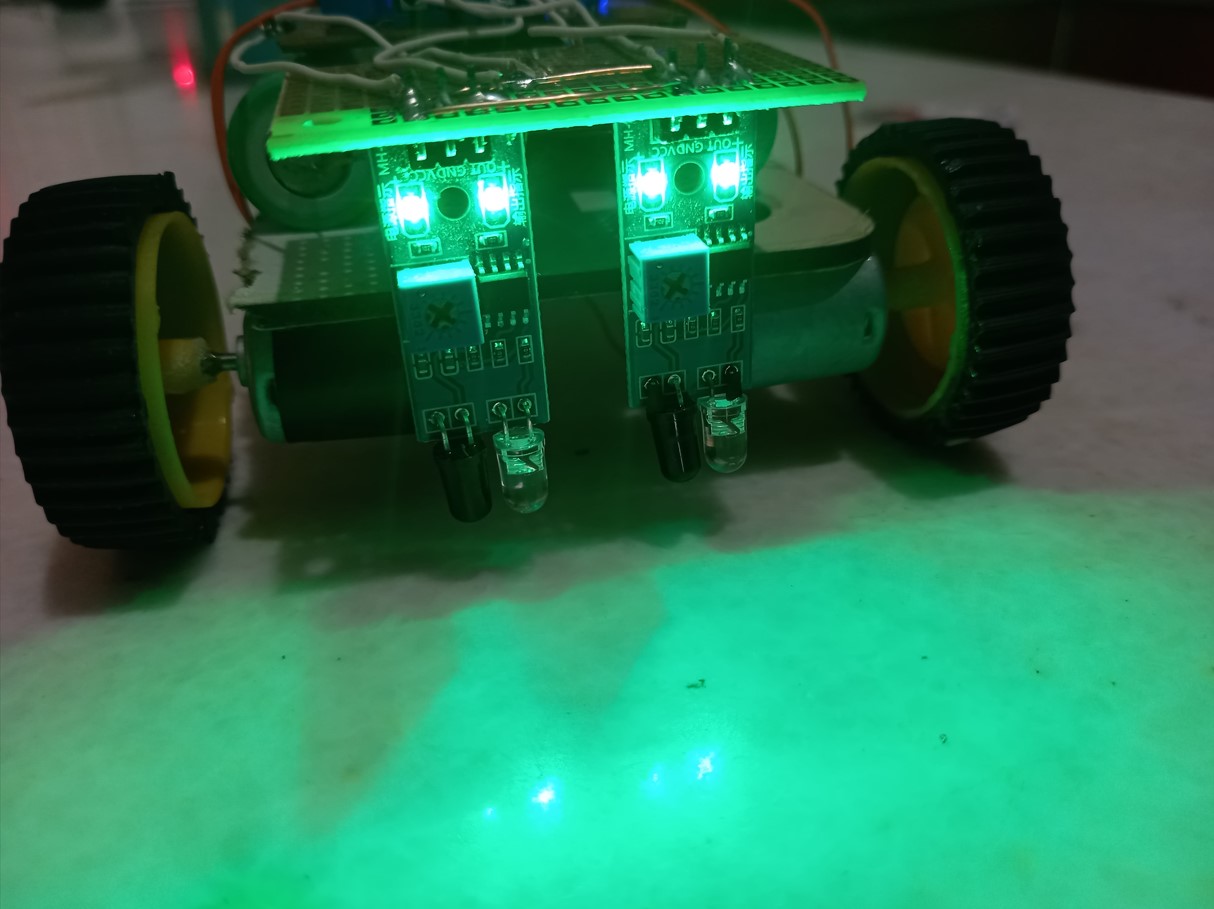
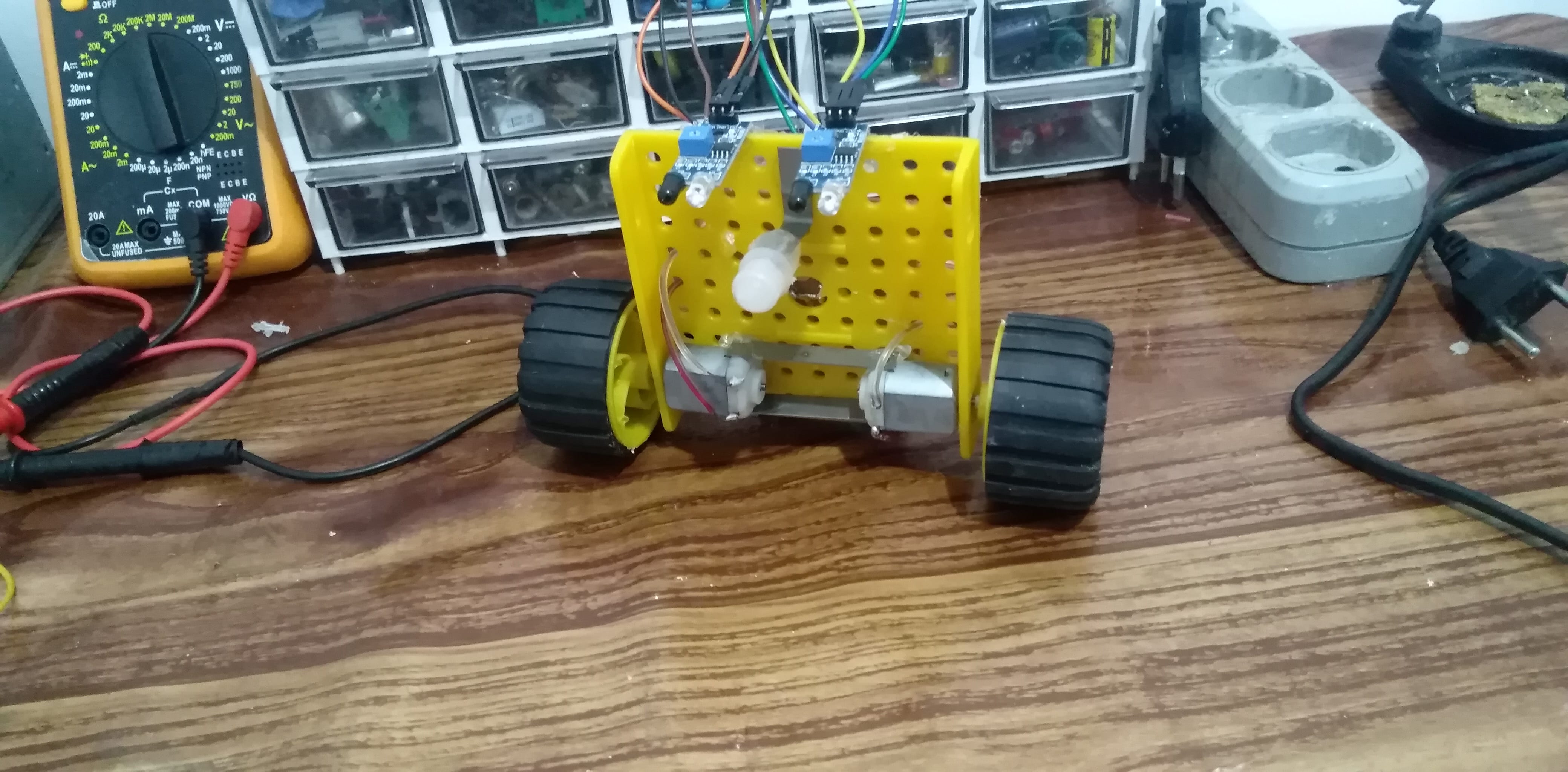
قطعات این دسگاه
موجود نداریم عزیز …
من یک ربات مسیریاب خیلی راحت می خوام درست کنم با قطعات رباتیکی که دارم
اوکی درست کن موفق باشی
میشه این شماتیکایی روکه دیدیم مونتاژ شدشو برامون بفرستید یا فقط شماتیکو نمایش میدید؟
فقط شماتیک ارسال میشه مونتاژ شده موجود نیست ..
سلام من خرید کردم میزنه فایل مورد نظر یافت نشد
لطفا برام لینک دانلود درست بفرستید یا واتس اپ یا تلگرام بفرستید
شماتیک ربات مسیریاب ساده رو خرید کردم
سلام وقت شما بخیر، فایل شماتیک خدمت شما مجددا ارسال شد
سلام چرا ویدیو ساختش لود نمیشه
سلام ممکنه سرعت اینترنتتون پایین باشه دوباره سعی کنید .
سلام قیمت رباتیک مسیر یاب درسته ۴۴ هزار تومان
سلام بله درسته